|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

 |
|
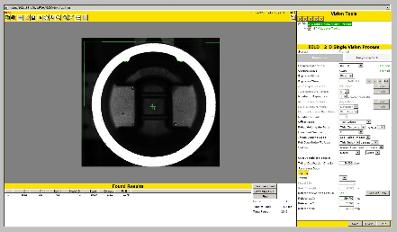
Erkennung der Verdrehung eines Zylinder im Greifer. Das Kamerasystem überprüft die Verdrehung des Zylinders im Greifer. Der Roboter hält den Zylinger in die Kamera Beim einsetzten des Zylinders in die Drehmaschine wird die Verdehung berücksichtigt. Somit befindet sich der Zylinder immer mit gleicher Ausrichtung im Spannfutter. |
|||||||||||||||||||
|
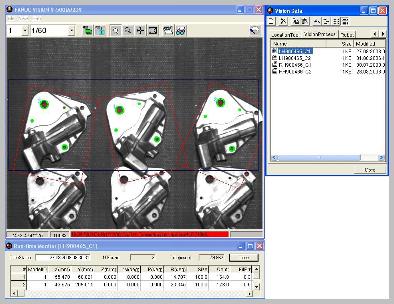
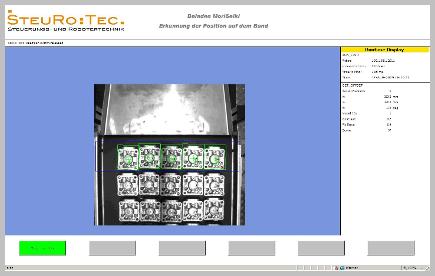
Erkennung von bis zu drei Teilen auf einem Transportband. Teile werden Kundenseitig grob vorpositioniert. Das Kamerasystem überprüft die Lage der Teile auf dem Band. Dem Roboter werden die Abweichungen der X , Y Koordinaten sowie die Verdrehung der Teile übermittelt. Desweiteren wird erkannt ob es sich um die im Bearbeitungszenrtum angewählten Teile handelt. |
|||||||||||||||||||
|
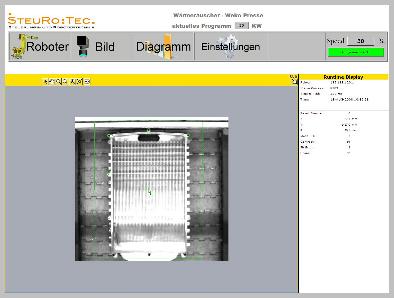
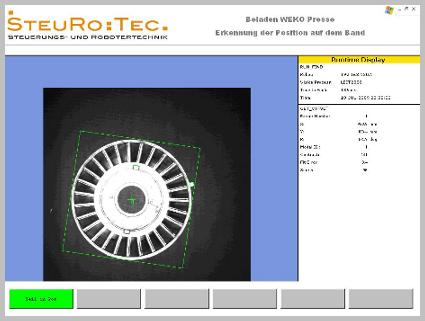
Erkennung von einem Gießteil auf einem Transportband. Teil wird zuvor von einem Roboter auf das Transportband abgelegt und dem Kamersystem zugeführt. Das Kamerasystem überprüft die Lage des Teil´s auf dem Band. Dem Roboter werden die Abweichungen der X, Y Koordinaten sowie die Verdrehung des Teil´s übermittelt. Erkennung dient zum einlegen in eine Presse. |
|||||||||||||||||||
|
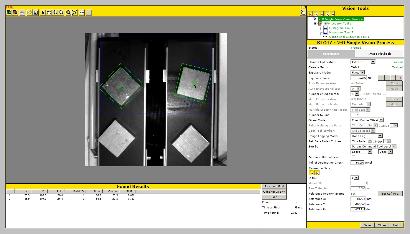
Zuführung von Rohteilen über zwei einzelne Zuführbänder Das Kamerasystem erkennt bis zu vier Teile auf dem Band. Dem Roboter werden die Abweichungen der X, Y Koordinaten sowie die Verdrehung der Teile übermittelt. Erkennung dient zum einlegen in eine Fräsmaschine |
|||||||||||||||||||
|
Erkennung von einem Gießteil auf einem Transportband. Teil wird zuvor von einem Roboter auf das Transportband abgelegt und dem Kamersystem zugeführt. Das Kamerasystem überprüft die Lage des Teil´s auf dem Band. Dem Roboter werden die Abweichungen der X, Y Koordinaten sowie die Verdrehung des Teil´s übermittelt. Erkennung dient zum einlegen in eine Presse. |
|||||||||||||||||||
|
Erkennung von einem Gießteil auf einem Transportband. Teil wird zuvor von einem Bediener auf das Transportband abgelegt und dem Kamersystem zugeführt. Das Kamerasystem überprüft die Lage der Teile auf dem Band. Dem Roboter werden die Abweichungen der X, Y Koordinaten sowie die Verdrehung der Teile übermittelt. Erkennung dient zum einlegen in ein Bearbeitungszentrum |
|||||||||||||||||||